
Julian Ryde
PhD Research
I spent my PhD years studying mobile robotics with a focus is on cooperative simultaneous localisation and 3D mapping (SLAM). Professor Huosheng Hu was my supervisor at the University of Essex in the UK.
Summary
It would seem difficult to overstate the importance of map building for autonomous mobile machines. Developing a coherent and unified approach to localisation and mapping is the prerequisite for fully establishing the mobile robotics era in the 21st century. There are two major elements to this research.
- Cooperative robot mapping is more accurate and reliable than single robot mapping
- 3D sensing and mapping is imperative for robots to operate successfully in the real world
A survey of the literature reveals that multiple robot approaches to mapping are only just being explored in earnest with the latest sensors. The research questions that will be pursued are presented against the backdrop of current research in multiple robot localisation and mapping.
Results
Some of the results achieved are illustrated below.
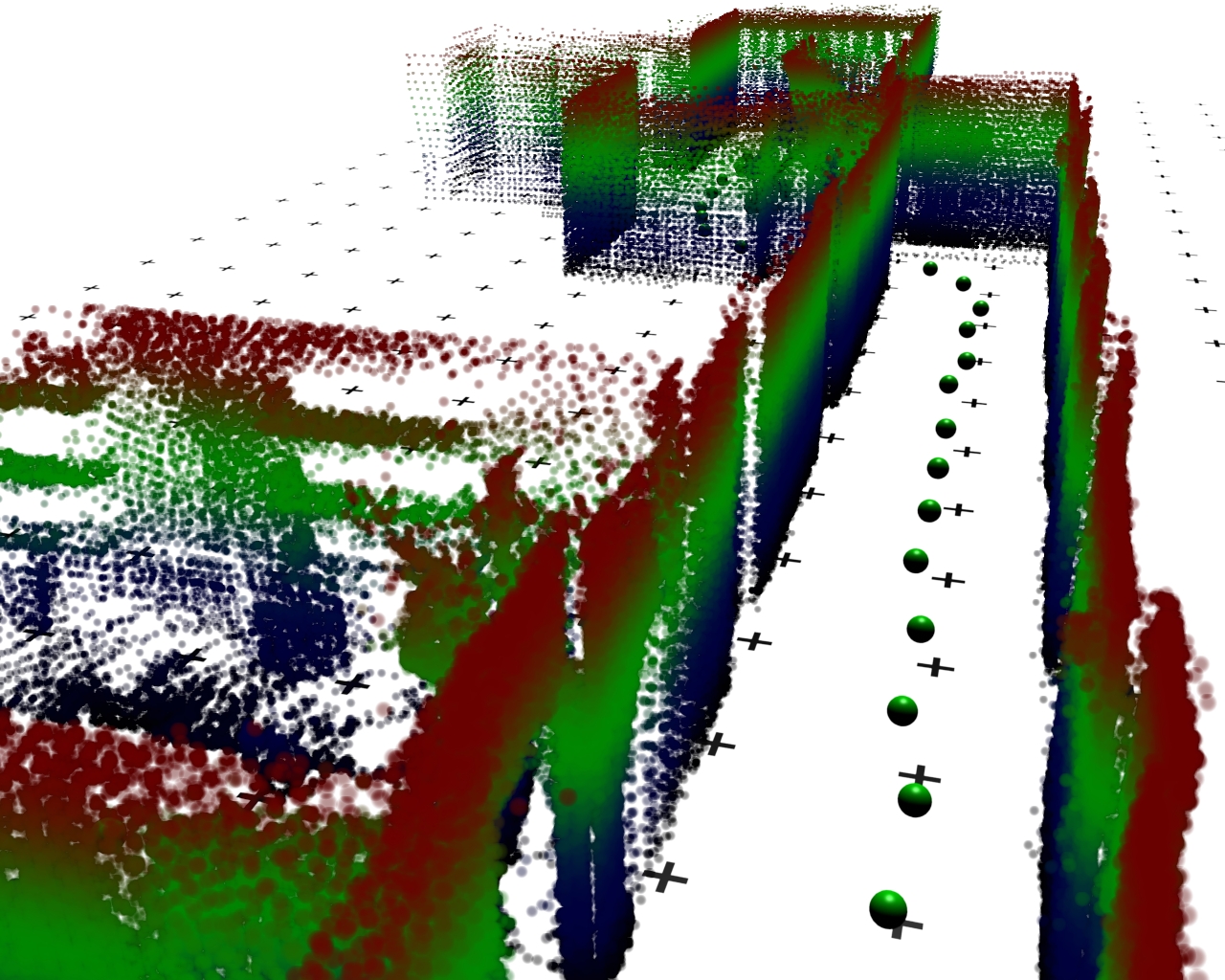
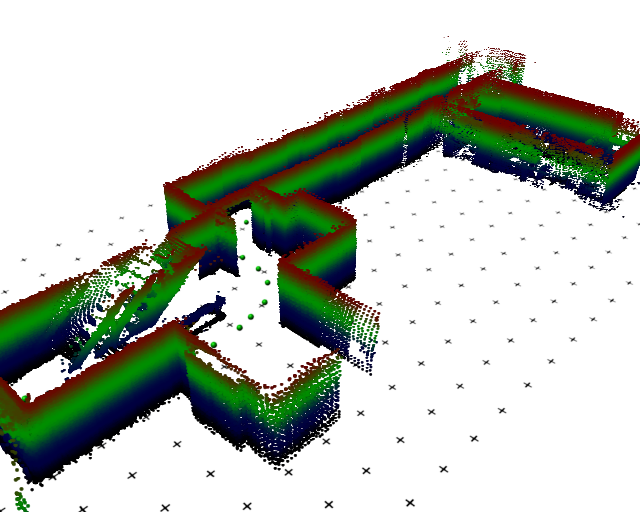
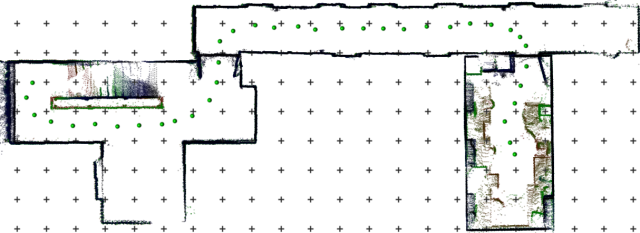
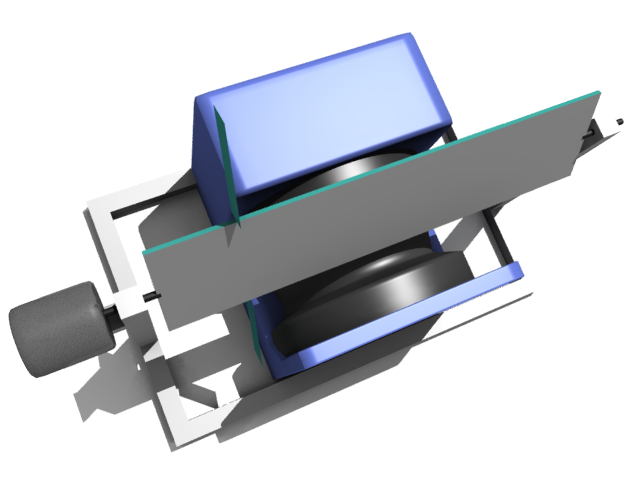
The data was gathered by modifying Sick LMS 200 laser scanners with a rotating mirror to gather 3D scans.
- Home
- Publications
- Research
- Teaching
- Software
- Leisure