
Julian Ryde
Open Source Software
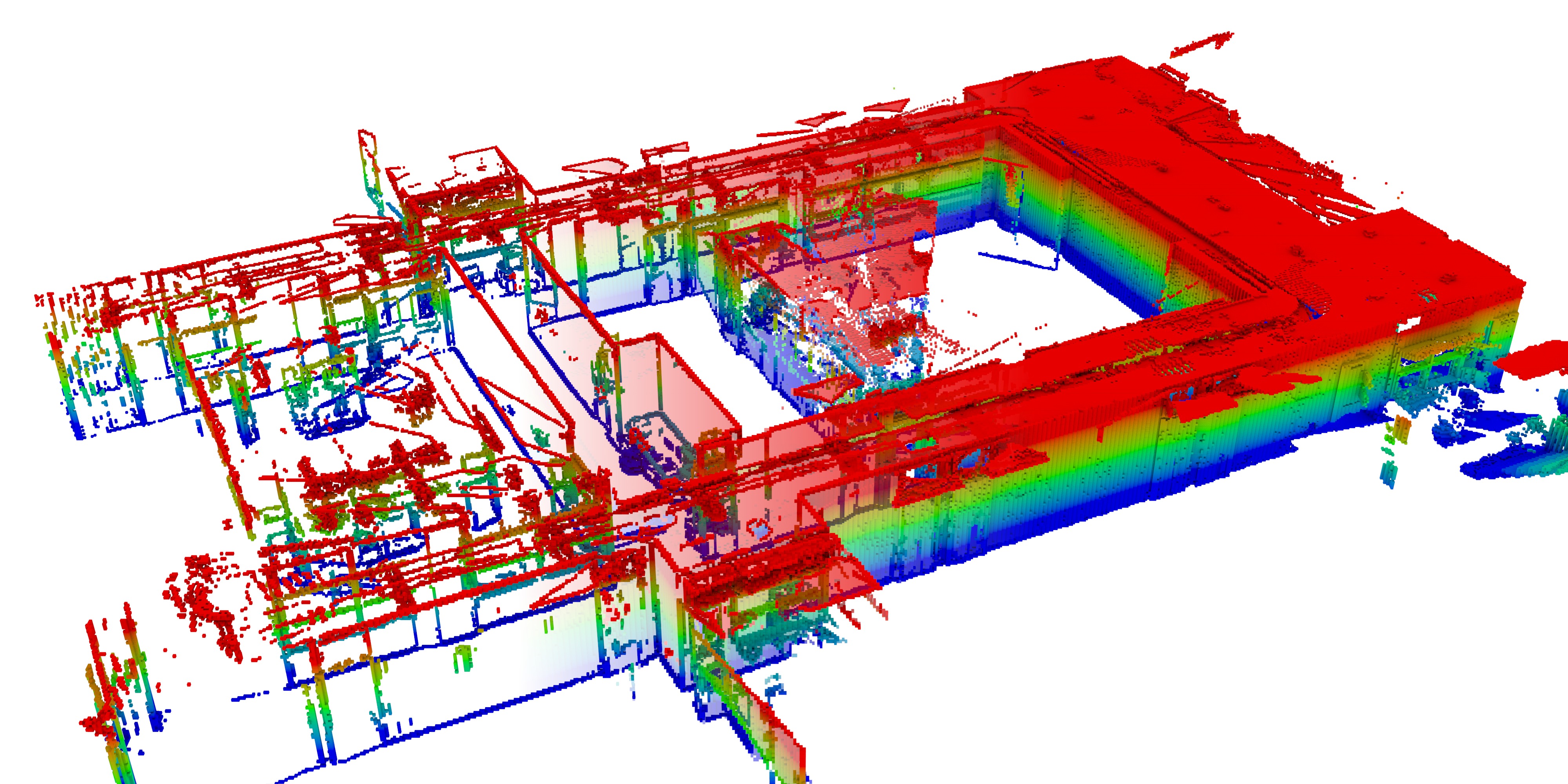
Multi-Resolution Occupied Voxel Lists, MROL
MROL project page on Launchpad
A python library with two elements. The first is an efficient multi-resolution voxel representation for fast proximity determination. The second is global and local alignment algorithms for merging multiple 3D point clouds into one map. Initial application is 3D mapping for mobile robotics. The mapping performs scan to map matching without feature extraction and consequently is environment agnostic, it works on with 2D (laser scans) and 3D range data and either 3DOF or 6DOF pose calculation.
The algorithms are described in the following papers. Please cite these in your work if you find this code useful.
- J. Ryde and H. Hu. 3D mapping with multi-resolution occupied voxel lists. Autonomous Robots, 2009.
- J. Ryde and N. Hillier. Alignment and 3D scene change detection for segmentation in autonomous earth moving. ICRA 2011.
Other related publications can be found in Publications.
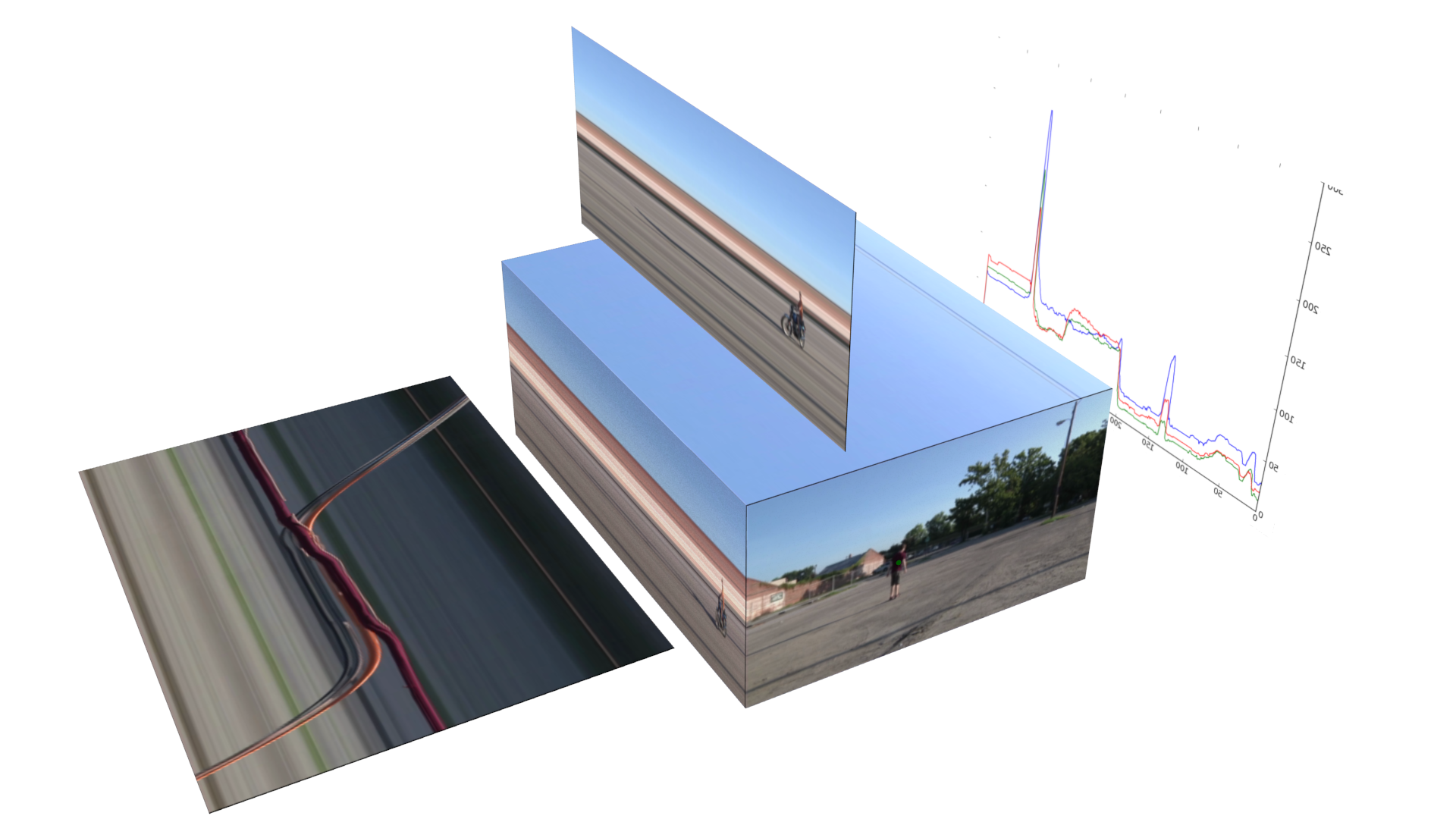
n-Dimension video/vision processing library, nDvision
nDvision project page on Launchpad
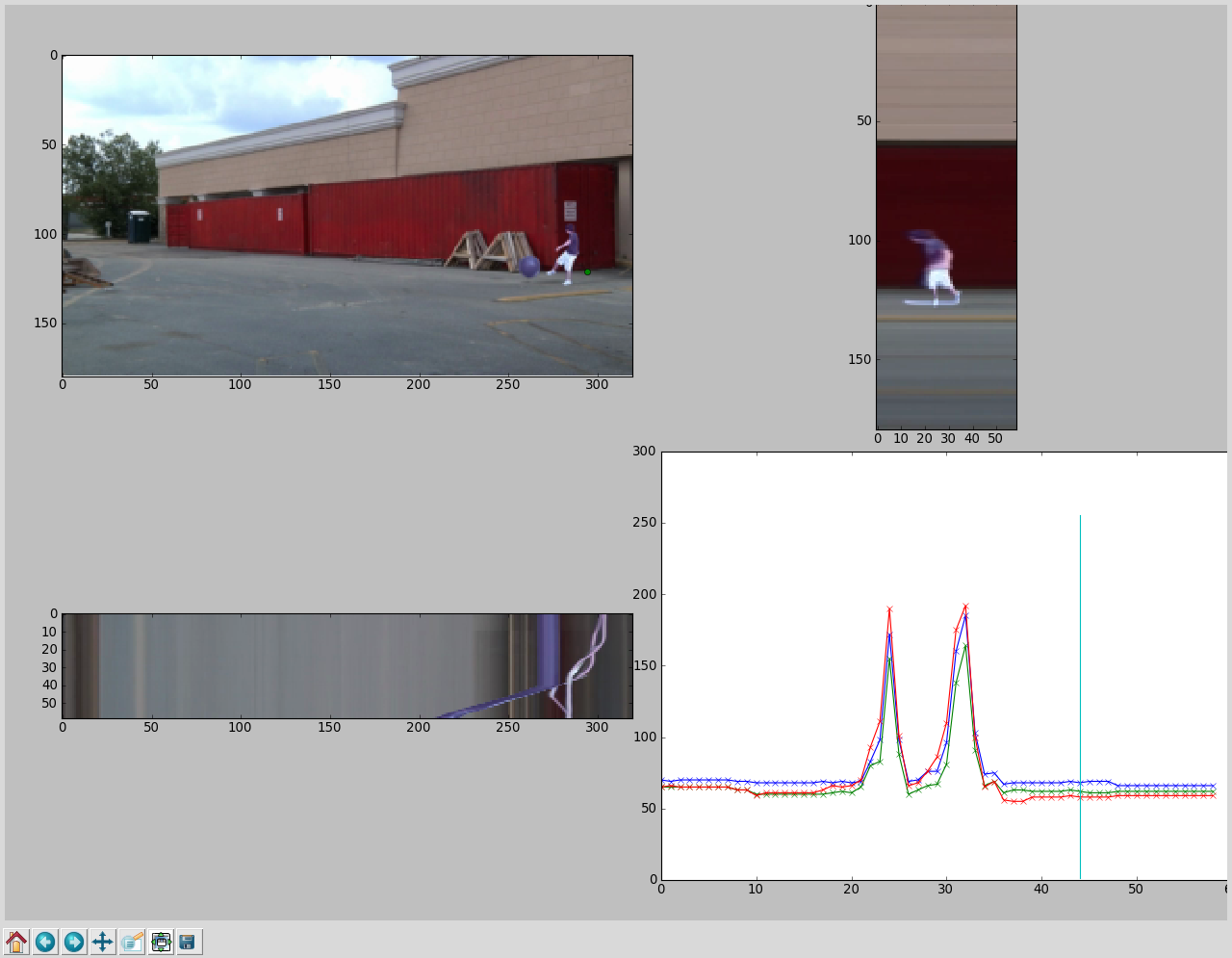
A python based computer vision and video processing library that works by representing videos as N-Dimensional arrays. Once in this form anyone familiar with numpy or matlab is ready to use the library. Combining the speed of C (numpy) with the ease of python allows for rapid implementation and experimentation of various video and visual processing algorithms.
Included is a video visualiser and functions for background subtraction, frame differencing, edge detection and other video spatio-temporal analysis.
This work was funded under the DARPA Mind's Eye project: W911NF-10-2-0062
- Home
- Publications
- Research
- Teaching
- Software
- Leisure